
From Idea to Real Motion
AI and digital tools are making automation ideas easier to create. ESMind helps deploy those ideas into real motion through structured workflows, simulation and FMC hardware.
Build automation workflows using structured step-based logic and deploy them across motion, I/O, analog devices .
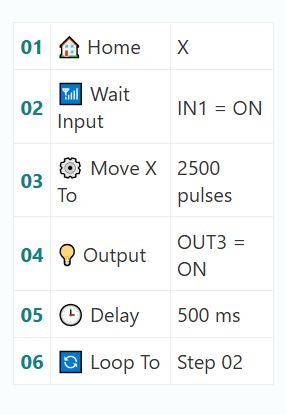
SelecStep Workflow
Structure your ideas into a logical sequence of actions.
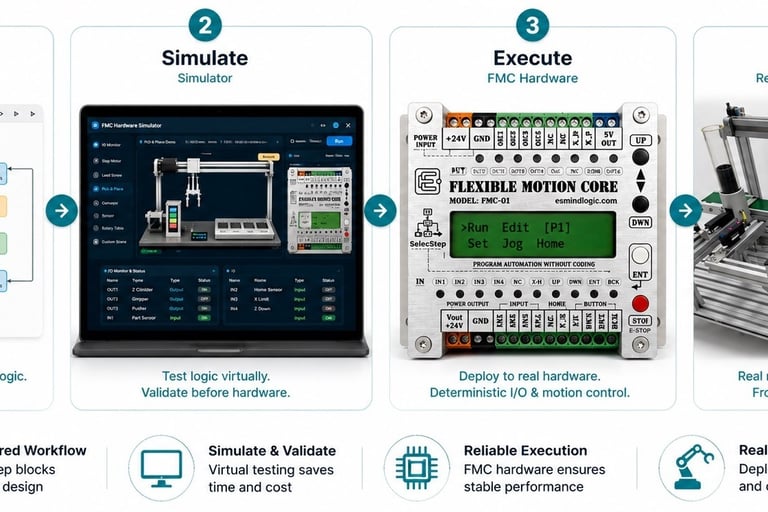
Simulator
Test the workflow before running it on real hardware
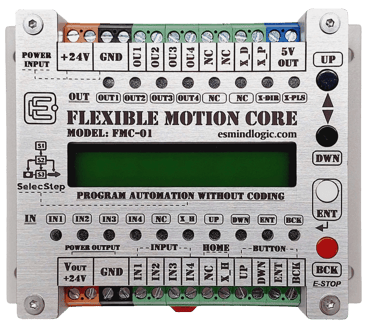
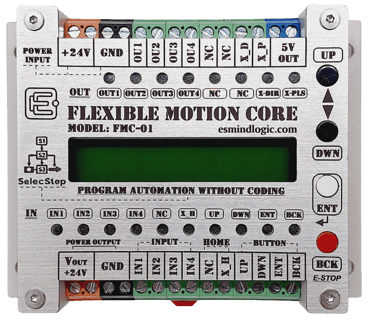
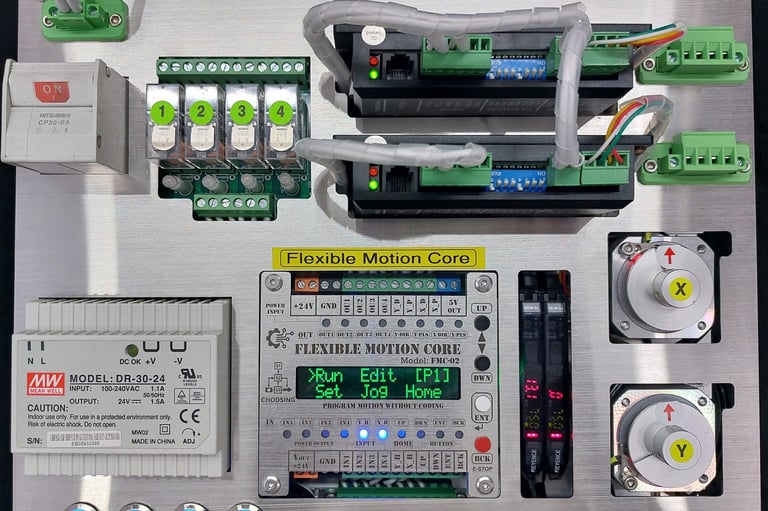
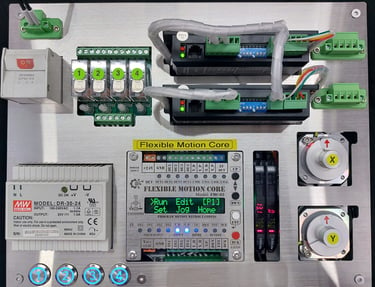
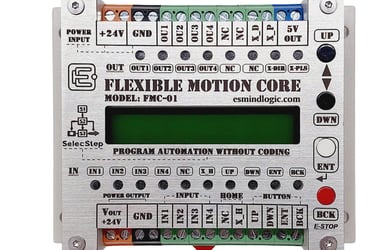
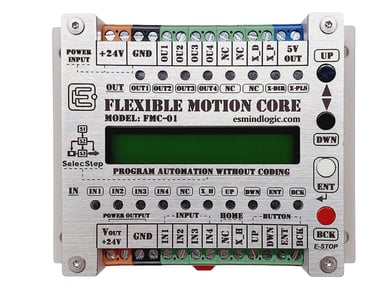
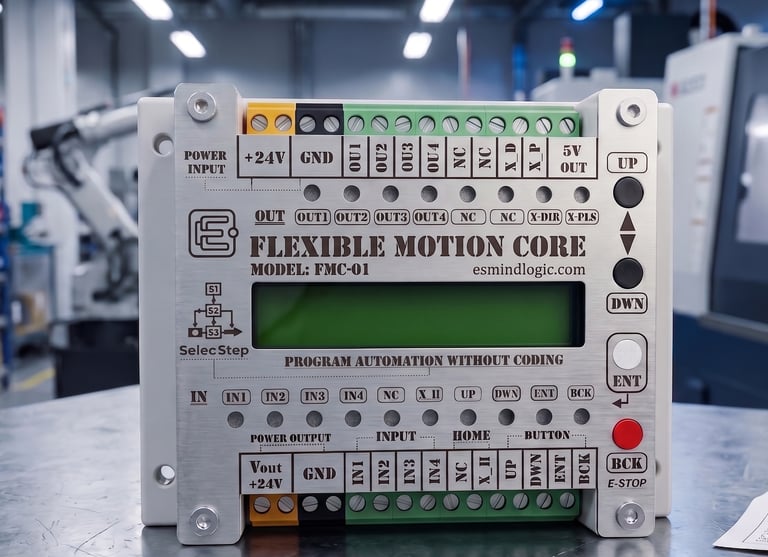
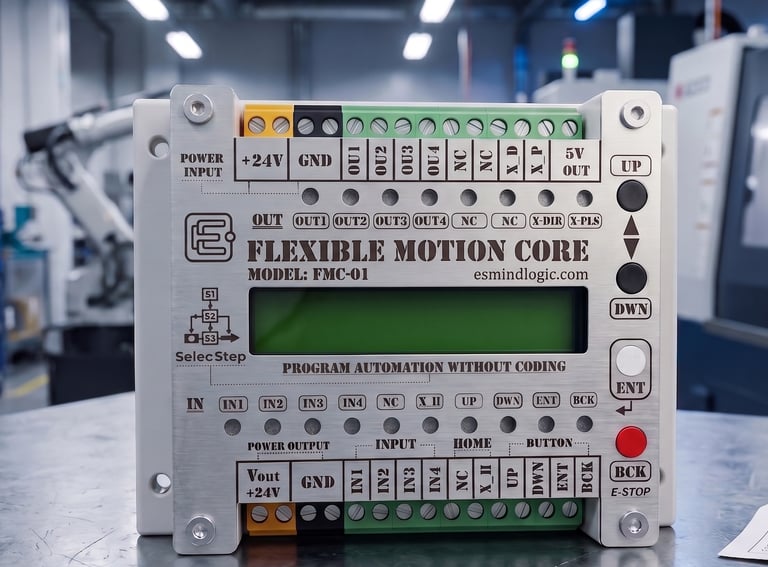
Flexible Motion Core
Execute the workflow on motors, sensors, relays, valves, conveyors, and automated mechanisms.

Portable motion control package
ESMind Logic Motion combines workflow software and execution hardware into one portable motion control package.
Portable Motion Control Package for Rapid Deployment
Machine Prototyping
Rapid build and modify sequence-based machines like conveyors, indexing tables, and pick-and-place lines without complex PLC programming.
Add-on motion capability to existing systems
A plug-and-play add-on module kit designed specifically for R&D engineers, academic researchers, and advanced prototypers working on custom robotics, wheeled platforms, or specialized drones
Education Kit
Introduce students to real-world industrial control principles and logic from day one without wasting terms troubleshooting coding errors.


Built for Rapid Deployment Across High-Mix Scenarios
A shortcut from ideas to real motion

A shortcut from ideas to real motion
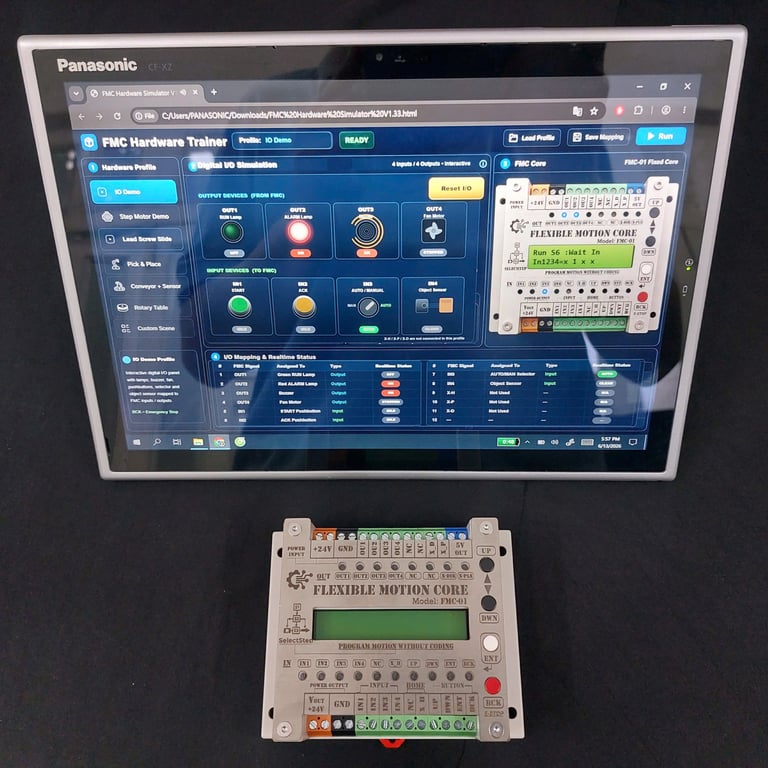
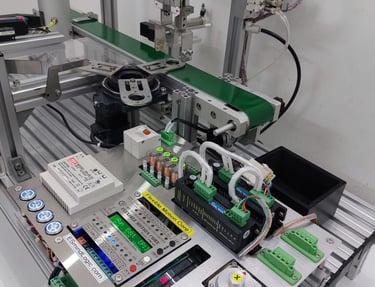
Portable Motion Control Package in Action
See how SelecStep workflow and FMC hardware come together to execute real motion/I/O sequences on motors, sensors, conveyors and pneumatic mechanisms.

Reach out anytime. We're here to help
contact@esmindlogic.com
Subscribe to our newsletter
. Core architect under patent filing
. SelecStep/FMC is not a certified safety system. System-level safety design and validation remain the responsibility of the integrator